This guide is for avionics, embedded, and systems engineers scoping ARINC 825-4 and CAN Bus (CAN FD) solutions that give a program a stronger path forward: more data capacity without abandoning familiar CAN architecture, more predictable aircraft messaging, cleaner integration planning, and better alignment between engineering, certification, program leadership, and test teams.
TL;DR Quick Answers
ARINC 825-4 and CAN Bus (CAN FD) Solutions
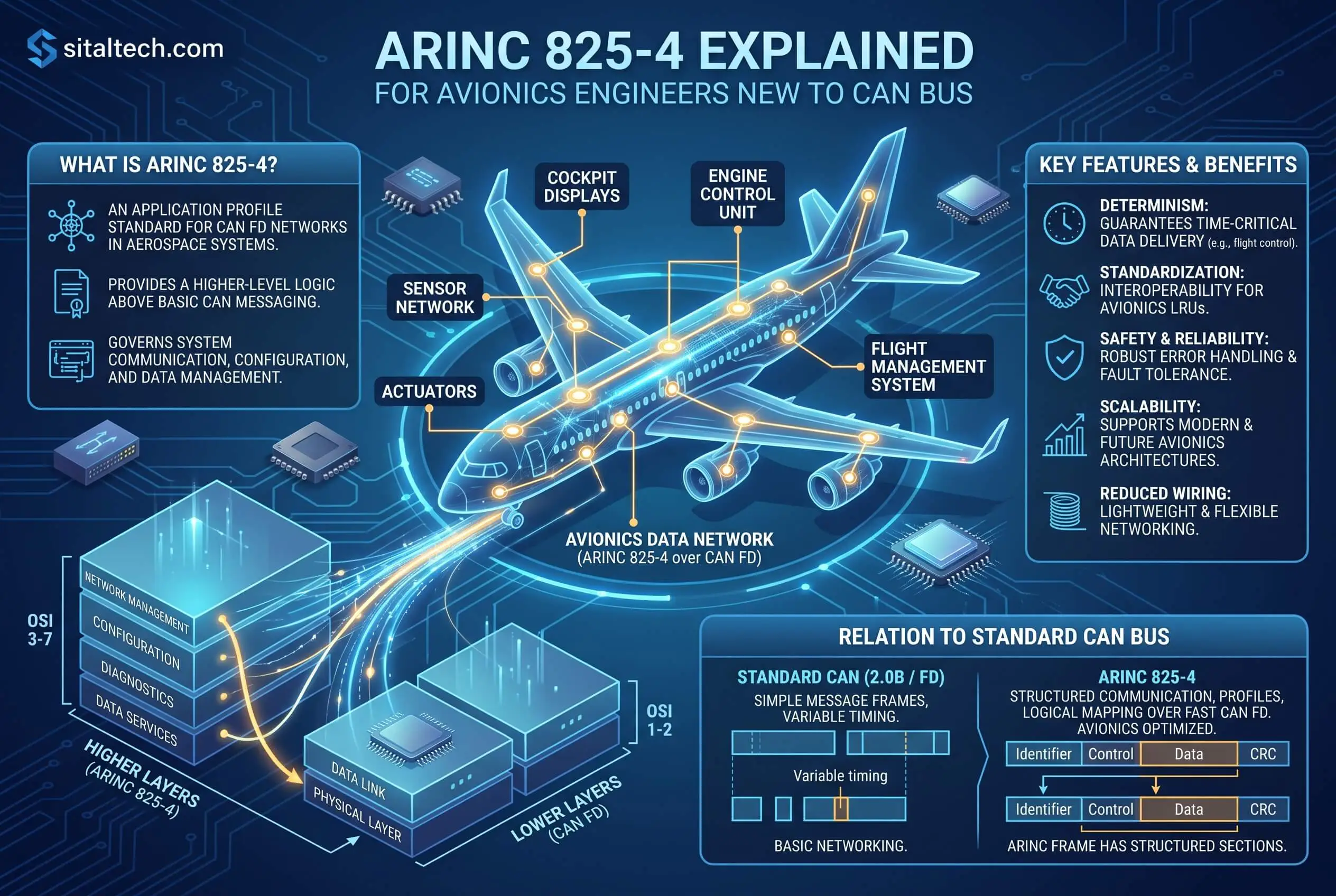
ARINC 825-4 is the 2018 revision of ARINC 825, the avionics profile of CAN bus, and it's the version that brought CAN FD to airborne networks. CAN Bus (CAN FD) solutions are the IP cores and board-level products that put it to work, and the ones built for aircraft do more than move data. They also watch the bus.
One core, three protocols: classic CAN (CAN 2.0B), CAN FD, and ARINC 825-4, with 11-bit and 29-bit identifiers and a data phase up to 4 Mb/s.
Security on the bus, not bolted on: patented "SnS" authenticates every node, white-lists message IDs, and flags spoofing and denial-of-service attempts in real time.
Built to certify: Bosch-compliant and DO-254 certifiable up to DAL A for avionics, defense, and automotive programs.
Finds wire faults early: passive TDR locates intermittent opens and shorts and reports distance-to-fault.
Top Takeaways
ARINC 825-4 is the September 2018 revision of ARINC 825, the standard for running CAN on an aircraft.
It builds on the wider CAN bus protocol family, bringing CAN FD into airborne use.
CAN FD’s gains are a larger payload and a faster data phase, up to 4 Mb/s, while staying compatible with classic CAN.
ARINC 825 standardizes identifiers, channels, and communication modes, so multi-vendor equipment shares one bus cleanly.
It serves as a subsystem bus alongside faster networks like ARINC 664, not as the high-bandwidth backbone.
Security is now a design input, not an afterthought.
ARINC 825-4 in Plain Terms
Why Aviation Runs a Bus Built for Cars
CAN started in automotive control and industrial systems in the 1980s. Aircraft borrowed it for the reason carmakers did. One shared twisted pair links many sensors and actuators, which cuts wiring weight and count. On an aircraft, CAN usually carries lower and medium bandwidth traffic and sits beneath faster networks rather than replacing them.
What ARINC 825 Adds on Top of CAN
Classic CAN, defined in ISO 11898, covers only the lower layers. It sets how bits move on the wire and how frames form, then stops. It says nothing about how an aircraft should organize messages, addresses, or priorities. The AEEC published ARINC 825 in 2007 to close that gap, building it on CAN 2.0B. The standard fixes the conventions that used to vary from program to program: 11-bit and 29-bit identifiers, logical communication channels, and modes like one-to-many and peer-to-peer. Equipment from different suppliers can then share one bus without each vendor writing its own scheme. Engineers comparing airborne buses often read it next to a more traditional standard, and this MIL-STD-1553B IP core selection checklist gives that contrast.
What Changed in Supplement 4
The big addition in ARINC 825-4 is CAN FD, short for Flexible Data-rate. A CAN FD node switches to a faster bit rate during the data part of a frame and carries a larger payload than classic CAN allows. In the ARINC 825-4 context, that data phase runs up to 4 Mb/s, four times the 1 Mb/s ceiling of classic CAN. Supplement 4 also added guidance the earlier versions skipped: manufacturer compliance, bit-timing configuration, monitoring counters, and security considerations for the bus.
The Core Ideas a Beginner Needs
Two ideas carry most of the weight. CAN is multi-master and message-oriented, so any node can talk when the bus is quiet, and each message’s identifier sets its priority. The most important traffic wins arbitration. CAN also confines faults, which means a node that misbehaves backs itself off the bus instead of dragging the network down. That fault behavior is a big part of why safety-relevant systems trust it, especially for B2B companies that depend on uptime, reliability, and predictable communication. One more habit separates the engineers who ship clean CAN designs from the ones who fight them. You design the message set, not the wiring, and agreeing identifiers, rates, and timing up front is the demanding, valuable work.
Security Is Now Part of the Job
Classic CAN has no built-in authentication, so any node on the bus can send a frame that looks legitimate. On an aircraft, that gap matters. The ARINC 825-4 security appendix reflects the shift, and it’s the part of CAN Bus (CAN FD) solutions we’ve put the most work into. A standard CAN controller moves data. Our secure cores also watch the bus they sit on, authenticating every node, white-listing message IDs, and flagging spoofing and denial-of-service attempts as they happen. The patented “SnS” (Safe and Secure) option runs that check at the physical layer, and the same sensor locates wire faults by passive TDR, reporting distance-to-fault across cable, stubs, connectors, LRUs, and termination.
“We’ve spent more than two decades fielding databus links in places that punish mistakes, from orbit to active theaters. The lesson that stuck is simple. The fault that grounds a platform is almost never the obvious one. It’s the spoofed frame a controller waved through, or the intermittent short that hid from every tester on the bench. That’s why our CAN cores authenticate each node and locate wire faults at the physical layer, so the bus flags the problem instead of a technician hunting it for days.”
Essential Resources
Specifying a CAN, CAN FD, or ARINC 825-4 design means weighing protocol fundamentals, certification, and real cyber risk. These seven sources are the ones we point engineers and program leads to, and every link here was checked.
ARINC 825 standard overview: the standard’s own primer on scope, history, and how CAN is positioned for the aircraft.
ARINC IA official ARINC 825-4 listing: the publisher’s page for Supplement 4, the place to confirm scope and revision status.
Accuris standards store: where to obtain the full ARINC 825-4 document when you need the authoritative text.
Kvaser ARINC reference: a vendor explainer covering ARINC 825 and how CAN FD reached the standard.
CSS Electronics CAN FD guide: a clear walk through CAN FD framing, bit rates, and efficiency for anyone new to it.
Bosch Semiconductors CAN protocols: straight from CAN’s originator, covering CAN FD and the licensing that governs it.
ISO 11898-1 catalogue page: the international standard that defines both classic CAN and CAN FD frame formats.
Supporting Statistics
Three numbers explain why Supplement 4 earned its place. Each links to its source.
Eight times the payload. CAN FD carries up to 64 bytes per frame, eight times the 8-byte limit of classic CAN, per CAN in Automation.
A three to eight times bandwidth gain. In real networks, CAN FD moves three to eight times the data of classic CAN, according to Kvaser.
Past the 1 Mb/s wall. Classic CAN caps at 1 Mb/s, while CAN FD’s data phase runs well beyond it, up to 8 Mb/s in general implementations, as Softing notes.
These statistics show why Supplement 4 matters: CAN FD gives ARINC 825-4 networks eight times the payload, three to eight times more real-world bandwidth, and a data phase beyond the classic 1 Mb/s limit, while a data bus fault isolation tester helps teams validate and troubleshoot that higher-capacity bus before integration issues reach the aircraft.
Final Thoughts and Opinion
ARINC 825-4 asks a CAN design to do a few things at once: move data reliably, prove it can be certified, and defend the platform it rides on. After 25-plus years of fielding databus products, here’s where we land.
Speed is the easy part. Reaching 4 Mb/s on CAN FD is table stakes. The harder, more valuable work is authenticating every node and finding a wire fault before it strands an aircraft.
Certifiability belongs on the buying checklist. A core that’s DO-254 certifiable up to DAL A saves a program the months of rework a faster-but-uncertifiable part would cost.
Physical-layer security holds up. Perimeter defenses get bypassed. A bus that authenticates its own traffic and reports its own electrical health is far harder to fool.
If your roadmap touches avionics, defense ground vehicles, or automotive control, the question isn’t whether to secure the CAN bus, but how early you build that security in.
Q: What Is ARINC 825-4?
A: ARINC 825-4 (Supplement 4) is the September 2018 revision of ARINC Specification 825, the standard that defines how CAN runs on an aircraft. It’s the version that brought CAN FD to airborne networks.
Q: Is ARINC 825 the Same as CAN Bus?
A: No. CAN bus is the underlying protocol, defined in ISO 11898 at the lower layers. ARINC 825 is the aviation profile on top of CAN, adding the addressing and channel structure aircraft systems need.
Q: What Does CAN FD Add in ARINC 825-4?
A: CAN FD, short for Flexible Data-rate, speeds up the data phase and grows each frame’s payload from 8 bytes to 64. More data moves per message. Supplement 4 brought it into the standard.
Q: How Fast Is ARINC 825-4 With CAN FD?
A: The data phase runs up to 4 Mb/s, four times classic CAN’s 1 Mb/s, while the arbitration phase stays compatible with classic CAN timing.
Q: How Is ARINC 825 Different From ARINC 429?
A: ARINC 429 is point-to-point with a single transmitter. ARINC 825 is multi-master, so any node can transmit when the bus is free, and the message identifier sets priority.
Q: Is ARINC 825 Mandatory on Aircraft?
A: No. Using ARINC 825 is voluntary. It often serves as a subsystem bus alongside higher-bandwidth networks like ARINC 664, and teams still follow FAA, EASA, and other applicable rules.
Ready to Secure Your CAN Bus, CAN FD, and ARINC 825-4 Designs?
Building or testing an airborne CAN network? Start with a clear identifier and timing plan, treat security as a first-class requirement, and pick IP designed for both, with the same discipline you would apply when selecting MIL-STD-1553 transceivers and transformers for mission-critical aircraft data buses. Handle those well and ARINC 825-4 carries far more than you’d expect from a bus this lean. When you’re ready to move from reading to designing, talk to a Sital field engineer and bring your message plan to the first conversation.






